广州定制AGV智能导引车厂家,AGV小车供应商






- 面议
- 2023-01-11 07:51:18
- AGV智能导引车,AGV小车供应商,AGV智能运..
- 曹先生 18825950465
- 广东省博瑞海曼科技有限公司

- 新浪微博


- QQ空间


- 豆瓣网


- 百度新首页

信息介绍
详细参数
AGV自动导引小车的引导原理是根据自动导引小车行走的轨迹进行编程,数字编码器检测出的电压信号判断其与预先编程的轨迹的位置偏差,控制器根据位置偏差调整电机转速对偏差进行纠正,从而使自动导引小车沿预先编程的轨迹行走。因此AGV自动导引小车行走过程中,需不断地根据输入的位置偏差信号调整电机转速,对系统进行实时控制。
日本在1963年引进AGV,其家AGV工厂于1966年由一家运输设备供应厂商与美国的Webb公司合资建成。1976年后,日本对AGV的发展给予了高度重视,每年增加数十套AGV系统,有神钢电机、平田电机、住友重机等27个主要生产厂商生产几十种不同类型的AGV。1981年,日本的AGV总产值为60亿日元,1985年已上升到200亿日元,平均每年以20%的速度递增,1986年,日本累计安装了2312个AGVS,拥有5032台AGV,到1990年日本拥有AGV约一万台。到1988年,日本AGV制造厂已达47家,如大福,Fanuc公司、Murata(村田)公司等,广泛应用于汽车制造、机械、电子、钢铁、化工、医药、印刷、仓储、运输业和商业上。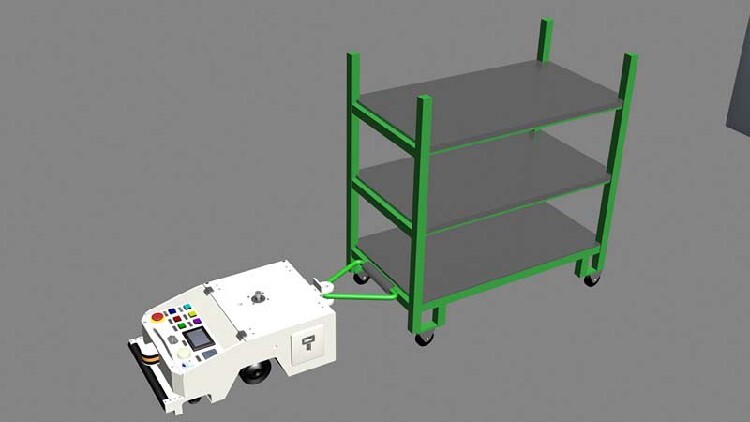
20世纪80年代末,国外的AGV达到发展的成熟阶段,此时美国的AGV生产厂商从1983年的23家剧增至1985年的74家。1984年,美国通用汽车公司完成了它的个柔性装配系统(FAS),从此该公司就成为当时AGV的大用户。1986年已达1407台(包括牵引式小车、叉车和单兀装卸小车),1987年又新增加1662台。美国各公司在欧洲技术的基础上将AGV发展到更为的水平,他们采用更的计算机控制系统,运输量更大,移载时间更短,小车和控制器的可靠性更高。
1960年欧洲就安装了各种形式、不同水平的AGVS220套,使用了AGV1300多台。到了70年代中期,由于微处理器及计算机技术的普及,伺服驱动技术的成熟促进了复杂控制器的改进,并设计出更为灵活的AGV。1973年,瑞典VOLVO公司在KALMAR轿车厂的装配线上大量采用了AGV进行计算机控制装配作业,扩大了AGV的使用范围。70年代末,欧洲约装备了520个AGV系统,共有4800台小车,1985年发展到10000台左右。其应用领域分布为:汽车工业(57%),柔性制造系统FMS(8%)和柔性装配系统FAS(44%).
自动导引运输车--AGV(Automated Guided Vehicle)是指装备有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车,AGV属于轮式移动机器人(WMR――Wheeled Mobile Robot)的范畴。工业应用中不需驾驶员的搬运车,以可充电之蓄电池为其动力来源。一般可透过电脑来控制其行进路线以及行为,或利用电磁轨道(electromagneticpath-followingsystem)来设立其行进路线,电磁轨道黏贴于地板上,无人搬运车(Driverless)则依循电磁轨道所带来的讯息进行移动与动作的运输车。
制造业:市面上的AGV搬运机器人主要还集中应用在制造业物料搬运上,AGV在制造业应用中以其、准确、灵活地完成物料的搬运任务。并且可多台AGV组成柔性的物流搬运系统,搬运路线可以随着生产工艺流程的调整而及时调整,使一条生产线上能够制造出十几种产品,大大提高了生产的柔性和企业的竞争力。AGV作为基础搬运工具,AGV的应用深入到机械加工、家电生产、微电子制造、卷烟等多个行业,生产加工领域成为AGV应用广泛的领域。
- AGV智能导引车,AGV小车供应商,AGV智能运..
- 自动导向搬运车
- 曹先生
定制AGV智能导引车信息
-
 揭阳AGV智能导引车,agv智能搬运机器人多少钱,AGV智能运输车厂家面议
揭阳AGV智能导引车,agv智能搬运机器人多少钱,AGV智能运输车厂家面议 -
 仙桃二手12米冷藏集装箱出租面议
仙桃二手12米冷藏集装箱出租面议 -
 秦皇岛新款时效振动机厂家,振动时效设备面议
秦皇岛新款时效振动机厂家,振动时效设备面议 -
 承德大型时效振动机规格,振动时效设备面议
承德大型时效振动机规格,振动时效设备面议 -
 珠海救护车转院费用-长途救护车出租转运-先服务后付费¥ 8
珠海救护车转院费用-长途救护车出租转运-先服务后付费¥ 8 -
 邢台多功能时效振动机出售,振动时效设备面议
邢台多功能时效振动机出售,振动时效设备面议






VIP推荐信息
-
 阳山县欣技8600工业级移动数据终端8630数据采集器
阳山县欣技8600工业级移动数据终端8630数据采集器 -
 金平区欣技8200企业移动数据终端8201手持终端PDA
金平区欣技8200企业移动数据终端8201手持终端PDA -
 迁西县欣技8000L掌上移动数据终端8000C便携扫描枪
迁西县欣技8000L掌上移动数据终端8000C便携扫描枪 -
 宿州欣技9700工业级移动数据终端
宿州欣技9700工业级移动数据终端



